 微信扫一扫,关注公众号
微信扫一扫,关注公众号

科技行者

算力行者
见证连接与计算的「力量」
对话宇树科技陈立:我们的人形机器人,为什么会后空翻?


作者| 金旺
栏目| 机器人新纪元
2023年8月15日,宇树科技对外发布了首款通用人形机器人H1,在次日的WRC 2023上,我们从宇树科技联合创始人陈立那里得知:
这款产品从立项到发布,仅仅用了6个月的时间。
与此同时,我们看到,就在这年年底,这款名为H1的人形机器人实现了小批量出货。
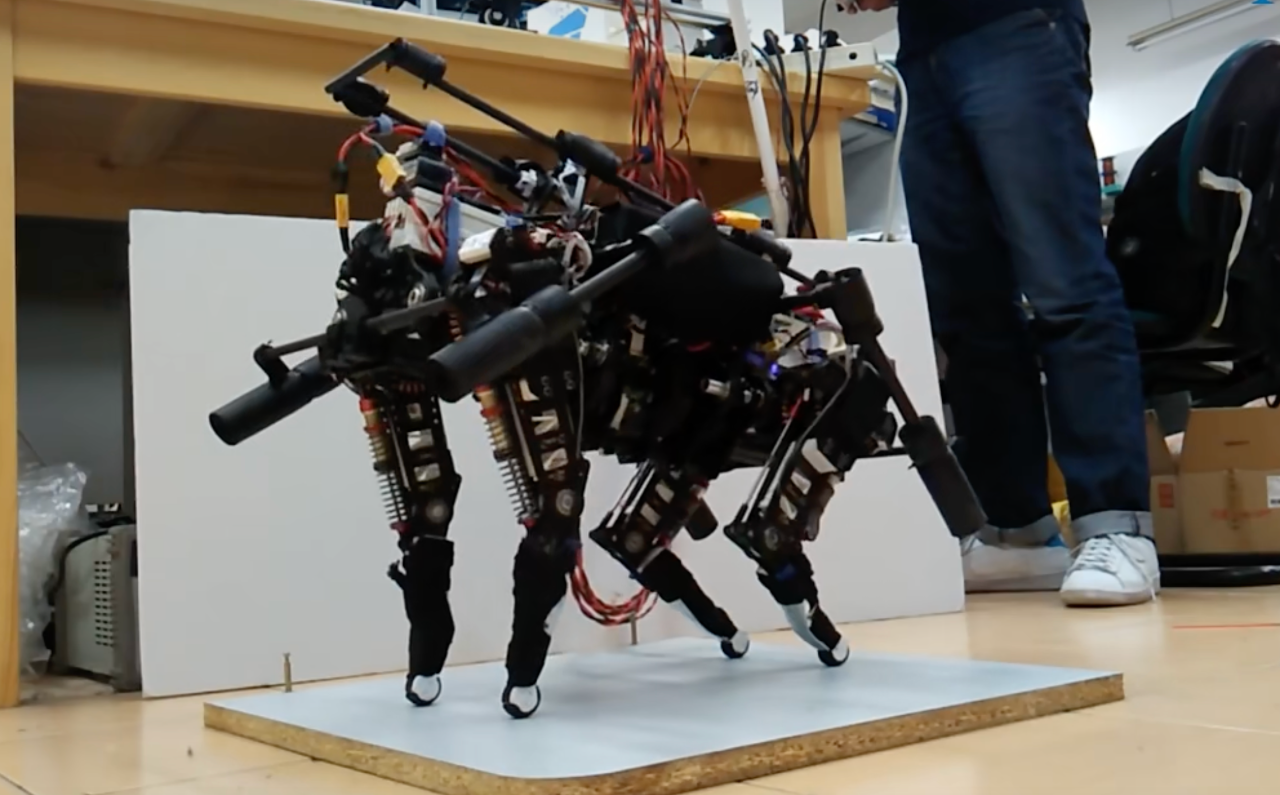
成立于2016年的宇树科技(以下简称:宇树),一向以“快”著称,即便是在那个电驱四足机器人的蛮荒年代,宇树从团队成立到第一款产品问世也是如此:
2016年底成立公司,2017年初拉起团队,2017年10月发布首款四足机器人产品,产品发布后马上有订单进来……
对于宇树而言,“快”是常态,不过,宇树科技创始人王兴兴也曾公开表示,在创业之初,他曾“坚决反对过做人形机器人”。
从最初的“坚决反对”到如今的“快速入局”,他们没有想到,人形机器人的时代会这么快到来。
就像当年他们没有想到,会那么快有机会,奔向四足机器人创业浪潮。
01 四足机器人的另一条路径
陈立和王兴兴是上海大学的同窗密友,常年混迹在同一个实验室里,只不过,他们当时并不在同一个课题组,用陈立的话说就是,“王兴兴当时每天都在做机器狗,我每天在看着他做机器狗。”
四年同窗情谊,在这个过程中逐渐建立起来,两人也互相熟知对方的能力所在。

王兴兴是个很有天赋的技术男,在那个波士顿动力的液压四足机器人还是主流的年代,他在实验室里就已经用一套电驱方案搭建出了四足机器人Xdog,并且凭借这一作品在2015年全国某机器人大赛中拿到了二等奖。
一年后,一位投资人通过这次比赛中的Xdog,找到了刚入职大疆的王兴兴问是否有意创业,这就有了后来的宇树科技。
2016年年底,王兴兴开始筹建自己的机器人团队,对于本就做过Xdog的他而言,原型机打造不会太难,商业化也就成了一个必须要尽早考虑的问题。
这时,王兴兴想到了大学时同一实验室中很有商业天分的陈立。
于是,王兴兴找到了在全球最大视频监控设备制造商之一企业中工作的陈立说,要不要一起做四足机器人?
陈立一直都知道王兴兴有创业做四足机器人的打算,尤其是在Xdog崭露头角这一年,电驱四足机器人也有了破土而出的迹象。
那些年,波士顿动力一直是全球范围内四足机器人领域的网红玩家,在2010年前后,该团队先后在YouTube上发布的BigDog和LS3演示视频,展现出了超强的运动能力,不过,这两款产品均采用液压驱动。

“当时大家都不敢想象能用电驱方案做四足机器人,最主要的原因是电机扭矩不够,”陈立告诉科技行者。
这也是王兴兴当年做出Xdog的稀缺性所在。
2016年,重做四足机器人时,宇树只有一个五六人的团队,当时他们相信,只要先把产品做稳定,未来一定会有市场。
一切就像他们预想的那样,第一款四足机器人很快在2017年10月完成研发、对外发布,他们为第一款四足机器人起名叫Laikago。

陈立告诉科技行者,“我们做产品研发,是先做产品的功能定义,包括整机尺寸、参数、性能等,做好功能定义后,会再反推支撑这样的功能需要怎样的核心零部件,然后去研发它们。”
此外,宇树从一开始就确立了全自研路线。
Laikago上用到的关节模组、主控板、BMS管理系统都是团队自研而来,尤其是关节模组,当时他们第一款采用行星减速器的关节模组能量密度做到了105N.m,这为宇树后续产品商业化时死磕稳定性和性价比埋下了伏笔。
2017年,市面上的四足机器人屈指可数,尤其是更有商业化潜力的电驱四足机器人。
陈立说,Laikago的出现最主要的影响是让机器人科研领域有了一款能买得到的电驱四足机器人,走出了“无狗可用”的困境,不过,宇树真正的目的是想加速通用(足式)机器人时代的来临。

实际上,Laikago一经发布,就有高校、研究所及企业实验室等前来询价采买,宇树团队很快拿到了商业订单,陈立的工作重心也正式从产品开发转到了商业化上,开始招人、做订单对接、商务管理,技术支持、输出解决方案、项目交付。
由于当时基于对成本的考虑,宇树新成立的销售部和技术支持部每个部门都只招了一个人,销售部会兼着把市场宣发一起做到位,技术支持部则负责解决售前售后客户答疑和对接,但这些工作,主要还是由陈立来一手抓。
2018年,陈立一人一狗参加CCF-GAIR 2018时,他半天不敢喝水,因为怕上洗手间会错过和客户交流的机会。

那是每个创业团队从产品研发走向商业化都会经历的一个过程,也是陈立最忙碌的日子。
不过,宇树真正繁忙的日子,才刚刚开始。
02 第一个商业着陆点
2019年,一款四足机器人后空翻的视频在网上爆火,在此之前,大多数圈内人想到会后空翻的四足机器人,都会波士顿动力的Spot。
不过,这款四足机器人不是Spot,而是宇树这一年对外发布的AlienGo。

会后空翻对于四足机器人真有那么重用吗?
陈立告诉科技行者,“四足机器人后空翻就实用程度上来看,其实没有那么重要,更多是一个综合性能的体现。”
陈立以更成熟的汽车产业为例解释称:
“一辆超跑零百加速只要二点几秒,一辆普通家用汽车零百加速需要6-10秒,除了在等红绿灯时,起步快一些外,在实际开车过程中不会有太直观的体验,但这确实是一辆汽车综合性能非常重要的直观体现。
四足机器人后空翻也是如此,例如在尺寸、重量、成本一定的前提下,你的关节扭矩是否足以支撑你的四足机器人做后空翻才是关键。”
也是自这款定位为“行业功能机”的AlienGo起,宇树的四足机器人开始真正进入商业领域。
以最早用到AlienGo的电力巡检应用场景为例,这是一个极其枯燥又亟需降本增效的场景,在这一场景中,往往各种表计安装位置较为低矮,人工巡检很难看仔细,还无法做到24小时巡检。
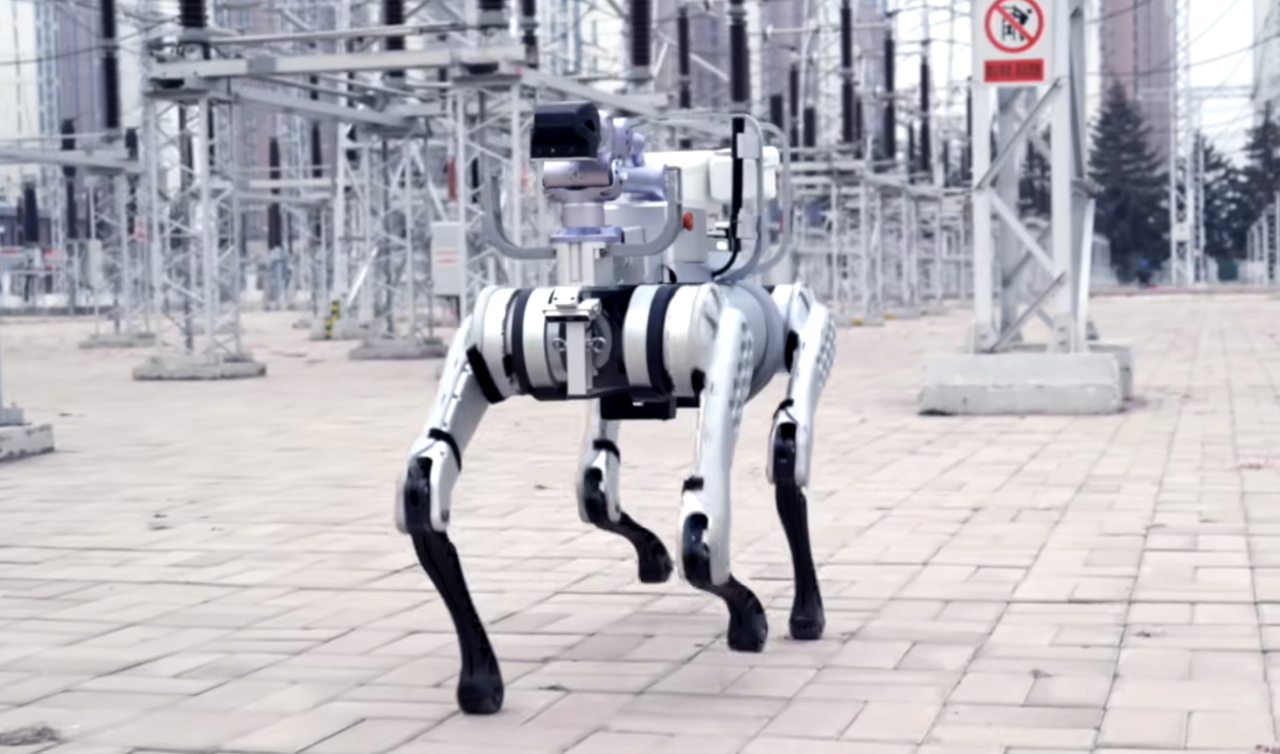
有的时候,巡检人员在经过几次巡检后,他们认为对这些数据已经了然于胸,然而一旦出现故障,往往又难以准确定位到故障点。
通过使用四足机器人进行电力巡检,不仅可以提升巡检准确度,也是一个将事后排故转向事前排查的过程。
电力巡检由此成了宇树在产业化上找到的第一个着陆点。
与此同时,在商业化道路上一直备受诟病的波士顿动力,在2019年终于开始将四足机器人Spot Mini推向商业市场,国内四足机器人市场也涌现出了优宝特、Dogotix等新玩家。
据陈立回忆,这一年,全球四足机器人销售额大概有几个亿,按销售量算的话,也就只有几千台。
就宇树自身来看,这一年,他们卖出了小几百台四足机器人,也算有了不小的收获。
虽然从市场规模来看,2019年的四足机器人仍属小众,但这一产品终于跨入了产业化阶段,一个新的周期缓缓开启。
03 错过的风口
2024年,陈立一直很忙,从春节过后到现在,一刻不曾停歇,这样的工作节奏也让他想起了三年前的热闹场景。
2021年2月,宇树24台四足机器人以小牛“犇犇”的形象登上了央视牛年春晚舞台,为刘德华、王一博、关晓彤伴舞,一时让宇树的四足机器人家喻户晓。

这是宇树四足机器人第一次登上全民舞台,陈立告诉科技行者,“春晚后,找我们询价的人数暴增,但基本都是普通消费者,一听要几万块钱,也就没了下文。”
这一年,登上春晚舞台的是宇树第一款小尺寸四足机器人——体积更小、售价也更便宜的教育版四足机器人A1,这款四足机器人最早是在美国拉斯维加斯的CES 2020期间发布。
这款机器人也直接将四足机器人的市价打到了10万元以内。
陈立说,“A1对于整个行业的意义在于,它让四足机器人从能买到但依然很贵,直接进入到了大家真正买得起的阶段。”

之所以能将售价打下来,依然是因为宇树从一开始就确立的产品全自研路线。
陈立认为,坚持核心零部件自研,以及整机全自研至少为宇树带来了三个好处:
首先,可以极大地击穿供应链成本。
“如果零部件自研,上游供应商就会从零部件供应商变成材料供应商,例如电机如果不是自研的话,供应商就是电机厂商,如果自研,上游供应商就是铜线、磁铁等材料供应商,中国传统材料产业做得并不差,性价比又很高。”
其次,宇树每一代产品都可以将硬件性能榨干。
“就用到行业场景中的四足机器人,考虑到负重和性能,一般都是越大越好,但是我们需要考虑成本和技术路线问题,我们一直在做一件事——在一定尺寸、重量、成本下,将现有硬件性能‘榨干’。”
最后则是产品设计上的优势传承。
“在整个产品体系迭代过程中,诸如线缆内置、电池快速插拔、关节被动悬挂系统等,是我们从AlienGo一直沿用到了现在。”
即便如此,在2021年,宇树登上春晚的A1,售价依然要几万元。
对于科研和商用而言,这样的价格已经很性感,但对于普通消费者而言,哪怕是和手机、笔记本这样的高端消费产品相比,这样的售价依然十分昂贵。
陈立回忆起2021年的场景,依然不免惋惜,“如果当时登上春晚的是我们的Go1,那结果一定会不一样。”
Go1是宇树在2021年6月发布的第一款真正面向消费市场的四足机器人,这款产品售价再次降低到了1.6万元。
实际上,这款产品立项早在2020年1月A1发布后就已经正式立项,是宇树内部面向消费市场规划的一款重量级产品。
在“错过”春晚后,宇树研发团队像打了鸡血一样,仅用了4个月时间,就将这款产品推向了市场。

也是在这一年,在宇树机器狗登上春晚、MIT四足机器人项目开源、小米四足机器人进入战场这几件关键战事推动下,四足机器人开始迈入消费市场。
从出货量来看,2022年,宇树四足机器人Go 1出货数千台。
这时,四足机器人离成为国民级产品更进了一步。
同样是在这年年底,ChatGPT的热潮,带火了人形机器人。
04 “抽空”做人形
对于每个机器人团队而言,要不要做人形机器人,都是一个需要考虑的终极问题。
因为人形机器人始终是机器人的终极形态,就像通用人工智能之于人工智能一样。
在2016年创业之初,面对投资人的一再追问,王兴兴表态“坚决反对做人形机器人”,因为当时他觉得人形机器人还很遥远。
不过,陈立告诉科技行者,“我们后来是在2019年想到要做人形机器人的,但当时四足机器人市场竞争很激烈,而四足机器人又是我们的主战场,我们一直没能抽出人手来做人形机器人。”
正因如此,宇树的人形机器人立项一拖再拖,直到2023年2月才在内部正式立项。
谈及宇树人形机器人立项原因,陈立告诉科技行者,主要有三个:
首先,特斯拉官宣要做人形机器人,我们觉得这会是一个风口;
其次,我们Go2和B2两款四足机器人研发进度超预期,终于能够抽出人手做人形机器人,“原打算Go2是2023年年底发布,但2023年7月我们就做完了”;
当然,最重要的还是人工智能技术突飞猛进,让我们看到了机会。
于是,宇树内部抽调了一些工程师,开始研发人形机器人。
在宇树内部,做人形机器人同样是软件、硬件两条腿走路:
一边是硬件工程师在做产品定义、开发人形机器人硬件本体;
另一边,软件工程师也在开发算法、在仿真环境中进行算法调优。
整个过程只用了6个月,宇树第一款通用人形机器人H1赶在WRC 2023前完成研发,并在这一展会上正式亮相。

能够这么快做出一款人形机器人,宇树官方的说法是——有做四足机器人的基础,做人形机器人并不难。
具体而言,陈立告诉科技行者,“H1最重要的膝关节,用的正是宇树四足机器人B2上360N.m的关节电机。”
这么快速成型的人形机器人很好地证明了宇树团队的技术实力,但必然会有很多不足之处。
陈立告诉我们,“去年8月发布时,我们这款人形机器人还有些问题没有解决,样机也只有展出的那几台,更重要的是,当时H1还不具备量产能力。”
因为要在年底进行小批量生产,仅仅是生产上遇到的问题,就够陈立头疼的了。
“以生产线装机过程为例,我们需要一遍一遍教操作工人如何组装,中间如果有一个工序出错,最后装起来的人形机器人看上去都一样,但实际运行起来,很可能会出错。”
当然,在过去这几个月里,宇树人形机器人研发团队又对这款产品在算法上进行了多次优化,在稳定性上得到了极大的提升。
稳定性提升最直接的体现是,今年3月,H1学会了后空翻。
05 大模型加速改变
为什么国内其他人形机器人,不会后空翻?
这是我看到宇树H1后空翻视频时脑子里冒出来的第一个问题,陈立告诉我们,这背后关乎的其实正是机器人的稳定性和可靠性。
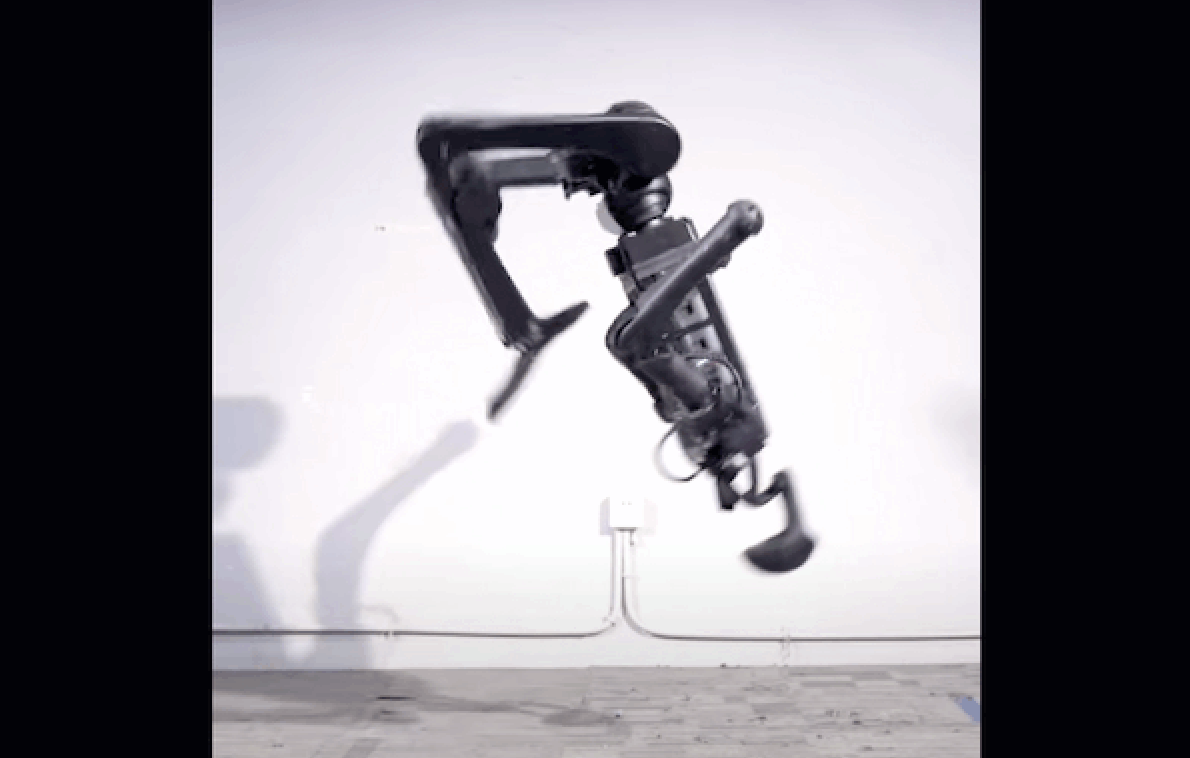
要想让人形机器人学会后空翻,首先要经得起“摔”。
宇树H1在学习后空翻过程中摔过很多次,也维修过几次,不过,陈立告诉科技行者,“这台人形机器人的本体和电机始终没有摔坏。”
更甚者,最后用来拍视频的这台H1,其实就是WRC 2023上展示的那台人形机器人。
很多人形机器人团队,如果关键零部件不是完全自研,摔坏了电机需要找电机供应商进行维修,如果更换电机,则又要重新调参数。
“很多人形机器人团队或者没有信心去做这件事,或者本身没有足够多的人形机器人去做测试,也或者他们已经试过了,但人形机器人摔得粉碎。”
稳定性、可靠性、成本是陈立认为人形机器人现在最需要解决的问题,宇树也正在小步快跑,解决这些问题。
这其中,人工智能技术的突破,成了推动人形机器人快速迭代的一大利器。
我们见到陈立时,美国英伟达GTC 2024结束不久,他告诉科技行者,宇树H1现在已经用上了英伟达的人形机器人通用基础模型,关于大模型对人形机器人带来的最重要的改变,陈立将其总结为“效率”二字。
“大模型让人形机器人在仿真环境中的学习效率更高,也让我们的研发同事得以更快将运动控制模型做出来……”
实际上,在去年9月,当宇树人形机器人团队几位工程师第一次开发人形机器人运动AI模型时, 最初做出来的AI模型用到机器人上近乎灾难,机器人运动起来东倒西歪,甚至站都站不起来。
某天晚上,宇树人形机器人团队一位工程师开着电脑对AI模型进行训练,晚上回家也没有关电脑,等第二天回来时发现,训练出来的性能超乎想象。
这正是当下人工智能技术为人形机器人带来的惊喜。
2023年,在宇树发布通用人形机器人H1时,仅仅在WRC 2023展会上,就云集了二十多款各式各样的人形机器人,人形机器人在这一年炽手可热,甚至令人眼花缭乱。
而在前不久首届中国具身智能大会上,陈立在演讲中指出,“人形机器人现在处于一个快速迭代过程中,大家现在都说自己的方案是最好的,但很可能明天就有一个企业或高校团队推出的人形机器人方案就比你的好,这很有可能,也是一个很必要的发展过程。”
“就产业发展而言,我希望这种迭代更新速度可以再快一些,这样就可以大幅缩短这一诸神混战的时期,将人形机器人快速推向产业落地期。”


好文章,需要你的鼓励

至顶头条

科技行者

码客人生

奇客Solidot

奇客情报站

奇客故事

从技术乌托邦到问题显微镜,AI for Good正在落到实处

北沟村的幸福蝶变:一场时间与技术的乡村交响

DeepSeek之后,中国人形机器人以“群体智能”再次掀起技术浪潮

阿里云李飞飞:将大模型,装进数据库里
金旺
主编
